Navio2リリース
Navioオートパイロットの新バージョンとなるNavio2が発表されました!


Navio2はコミュニティからのリクエストも受け様々な機能が向上しています。
【Navio2の新機能】
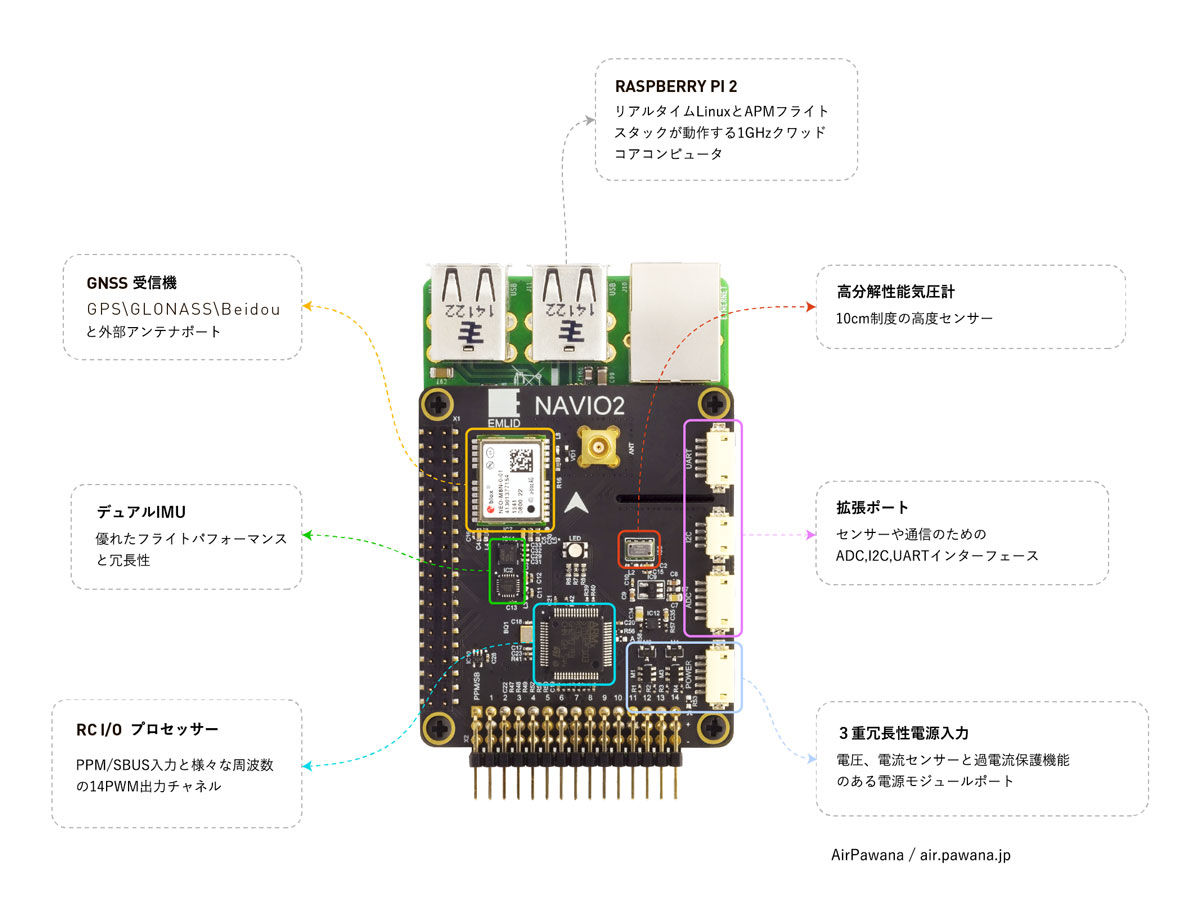
デュアルIMU : フライト性能と冗長性の向上のため、セカンドIMUチップを搭載しました
電源回路向上:Navio+から実装済みのトリプルOR接続ダイオード回路に加え、Navio2は過電圧、過電流保護機能を加え、ボードとRaspberryPiを保護します。
MS5611性能の向上:ノイズの発生を抑えるため、MS5611をI2Cバス上にのみ使用しています
PCA9685 PWMジェネレータをマイクロコントローラーに置き換え:以前のバージョンのNavioではPCA9685チップを PWM生成に使用していました。このチップはチャンネル毎に周波数をコントロールすることができませんでした。これは異なる周波数で動作するモータとサーボの場合の問題となります。この問題を解決するために出力チャンネルのグループ毎に周波数を設定できるマイクロコントローラに置き換えしました
PPM/SBUSはDMAの代わりにマイクロコントローラでデコーディング:Navio+ではPPMシグナルのサンプルにDMAを使用しており、これはシステムの負荷になっていました。Navio2ではPPM/SBUSを扱うマイクロコントローラを搭載したため、RaspberryPi2のプロセッサを別のタスクに使用することができます
AUX SPI:Navio2はRaspbeeryPiのAUX SPIコントローラーを使用する最初のHATです。二つのSPIコントローラーを使用することで、より効率的にセンサーを使用することができます。RaspbeeryPiベースのソリューションに2倍バンド幅を持つことで、より多くのデータをより早いスピードで処理できます
ADCポート:ボードの下にあるためNavio+でADCチャンネルを使用することはユーザーフレンドリーではありませんでした。Navio2ではDF13ポートでより簡単にアクセスできます
よりよいLinux統合:PWM、ADC、SBUS、PPMはLinux sysesで統合されどのプログラム言語からもより簡単にアクセスできます。
【他の小さな変更】
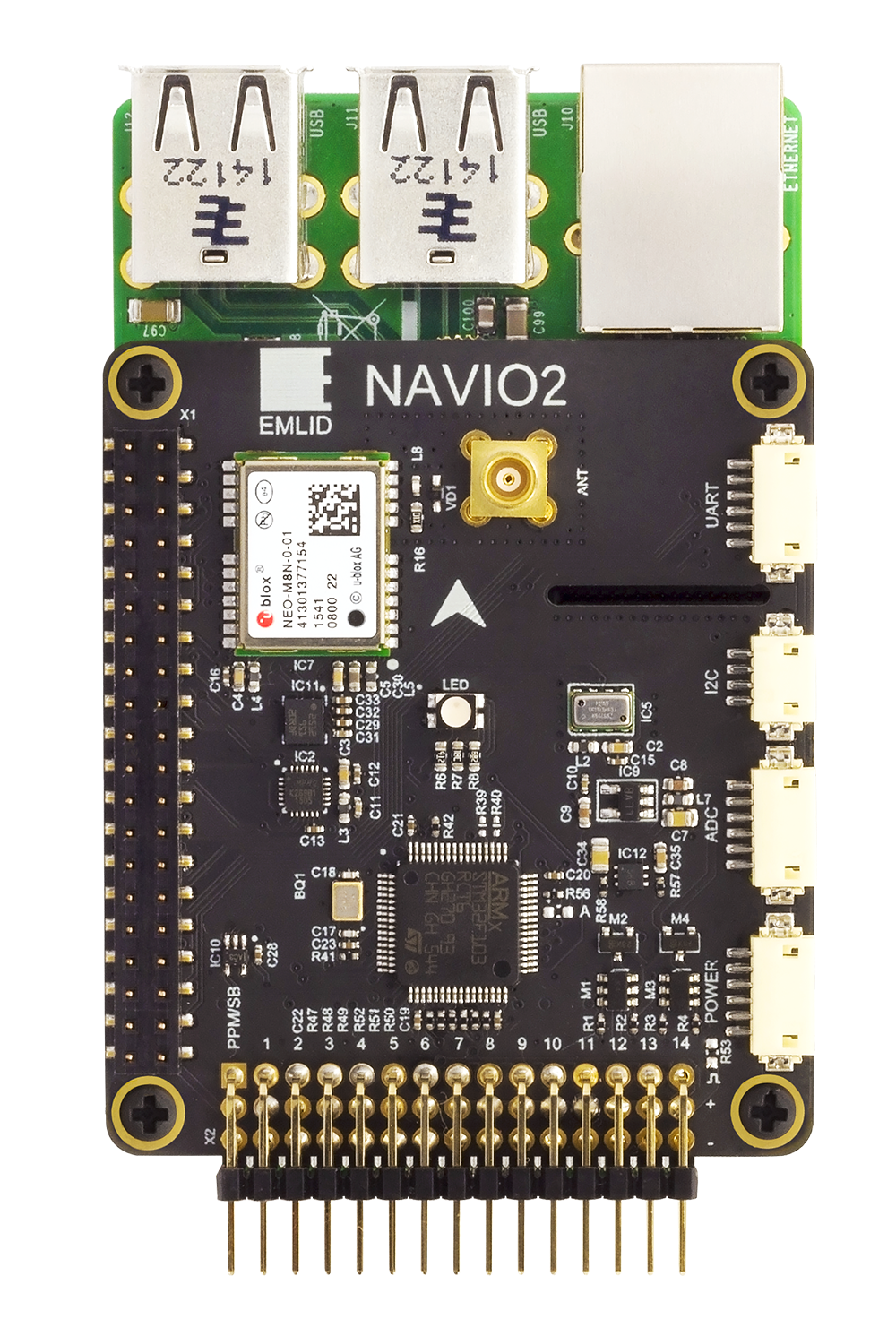
- サーボヘッダーを右側に
- よりよりLEDの可視性のためRGB LEDの位置を中央に
- UARTポートのプルアップピンで3DRの無線接続が簡単に
- 磁気の影響を押させるためナイロンスクリューに
- カメラケーブル用スルーホール
- ESDクランプでPWMチャンネルを保護
購入
Navio2のご購入はこちらから