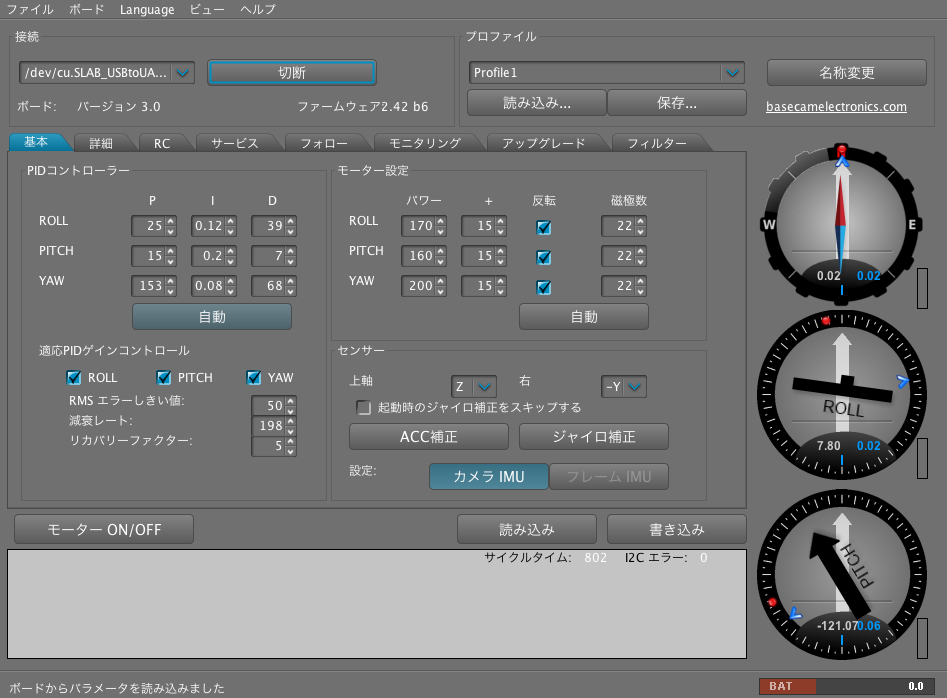
SimpleBGC GUI 2.43がリリース
SimpleBGC2.43がリリースされました。
主な機能は以下の通りです。
– 新しいGUI”変更可能な数値タブ”が追加され、RCのダイアルを使ってリアルタイムに様々なパラメータを変更できるように。
– モータビープの音色が増える
– シリアルAPIコマンドが増える
– PIDオートチューニングがより精密に
– すべての設定を一つにファイルに保存-読み込み
http://www.basecamelectronics.com/downloads/32bit/